Electric Scooter: Original
 So what do you do when you’re in college, strapped for cash, annoyed at how long driving to class takes, and have a bunch of old robot parts lying in your garage? You design and build an electric scooter of course!
So what do you do when you’re in college, strapped for cash, annoyed at how long driving to class takes, and have a bunch of old robot parts lying in your garage? You design and build an electric scooter of course!
The end product used two, 1HP electric DC motors with four, 16Ah 12V SLA batteries. It went about 18MPH and got me to class (or almost anywhere else in SLO) faster than driving - all for an out of pocket cost of less than $250.
The juicy bits:
I started with the most expensive pieces a
nd basically designed from there. These included the EV Warrior motors, the SLA batteries, and the high-power solenoids. I got an old kids scooter frame as a host chassis and started solid modeling a mount for everything.
For the mounting box, I used a CNC plasma cutter and welder at the Cal Poly senior project lab.
Since I didn’t want to spend the cash on higher power speed controllers (the ones from OverBearing were too wimpy), I just created a basic series/parallel circuit using three of the uber solenoids. This gave the scooter 2 speeds: 12-volt operation which went about 6 MPH (good for riding around people on campus) and 24-volt operation which went about 18 MPH (the standard cruising speed). These were controlled with a simple rocker switch on the right handle bar.
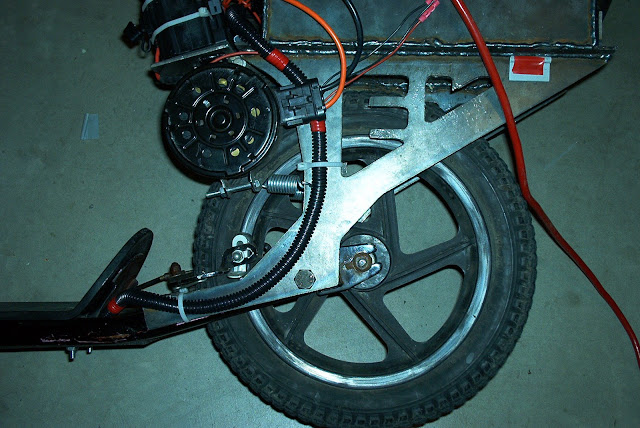
The power from the motors was delivered straight to the wheels via a one-way friction clutch. Each motor was attached to one side of the clutch, and the whole thing was tensioned against the wheel using a couple springs.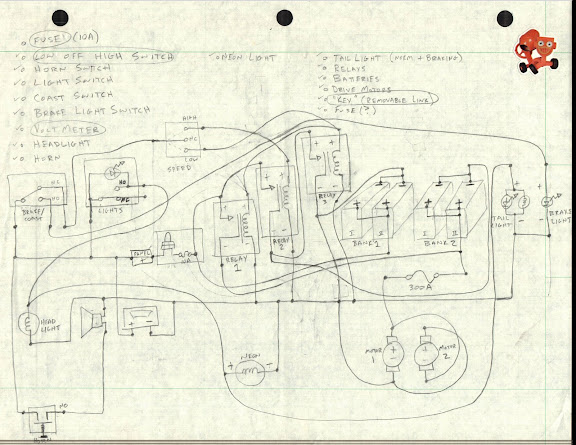
As you can see from the electrical wiring schematic and parts lists, even a relatively “simple” scooter has a ton of wiring. All of that stuff was just to run the motors, a headlamp, and a brake light. Well, not entirely. I also had an under-deck neon blue light. ![]()
Testing Results:
Initial
- 12.3 miles (batteries drained) / 71 minutes moving
- 25.6 MPH max
- 10.5 MPH moving average
- 9.0 MPH overall average
After Motor Re-Timing
- 7.4 miles (batteries not drained) / 33 minutes moving
- 24.6 MPH max
- 13.2 MPH moving average
- 9.6 MPH overall average
“Lessons Learned” (aka screwups):
- Friction drive sucks. Not only is it horribly inefficient compared to belt/chain, but it’s loud and it eats through tires like crazy nuts.
- Adding 100 pounds of metal and batteries plus 175 pounds of rider to a child’s scooter meant to handle maybe 40 is a no-no. Bottom line is that it worked, but since there was so much weight, sharp turns would send the frame into a very unstable oscillation. I think that everyone who rode it almost ate it at least once because of this. Fortunately, I got used to it and it wasn’t too bad. Also, since the thing was designed to go maybe 8MPH with a kid, the brakes were grossly under powered. I replaced them more often than the tires.
- Not having a dead-man’s switch on something so powerful is dangerous. There was more than one time that I couldn’t react fast enough to kill power when I really needed to.
- Running 12-volt motors at a full 24 volts for an extended period of time can be bad. This is a pretty common thing in BattleBots because of the weight advantage, but those matches are only 3 minutes long. Before I added forced air cooling to the motors, they would routinely get too hot to touch and in one case, caught on fire.
Mostly because of these shortcomings (and the maintenance caused from them), I retired the scooter in the summer of 2006. I’ve since obtained a new eGO scooter that I use for in-town transport.
For more pics, take a look at the complete set on PicasaWeb.